Commands
You can use spc_request_dev or spc_request_sys function of the SPC library when setting or using a smart expansion board.
spc_request_dev($sid, $cmd)
spc_request_sys($sid, $cmd)
- $sid: a slave ID
- $cmd: a command string
Common Commands of Smart Expansion Boards
The commands commonly supported by all smart expansion boards use the spc_request_sys function.
The following is a list of smart expansion board common commands.
| Command | Option | Description |
|---|---|---|
| get | did | get a device ID |
| get | uid | get a unique ID |
PES-2402 Commands
The commands that apply to each smart expansion board use the spc_request_dev function.
The following is a list of commands supported by the PES-2402.
| Command | Option | Description |
|---|---|---|
| set | $port delay $time | set a delay time on a specified port |
| get | $port input | get status of a specified port |
- $time : delay time(1 ~ 30,000, unit : millisecond)
- $port : an input port(0 ~ 3)
"set ~ delay" command
If the input signal level changes but does not be maintained for the specified delay time, PES-2402 will ignore it. The unit is milliseconds and the setting range is 1 to 30,000. If set to zero, the minimum value is applied. This command takes effect until the another "set delay" command for the same port is run.
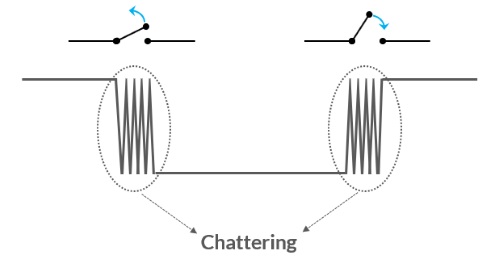
This command is designed to avoid impact of the chattering phenomenon. This phenomenon happens when a manual switch repeatedly turns on and off in a short time because of vibration of the contact. This may cause malfunction in some kind of application.